This week, we took a break from actually working on our prototype, and stopped for some constructive criticism on it. Professor Vishal assigned each team to another team that was similar or used similar ideas/ materials in their project. The teams sat down with each and provided an overview of the current design, and how it was currently functioning. The team that was critiquing would ask about the design, the issues that needed to be resolved, and other questions as well.
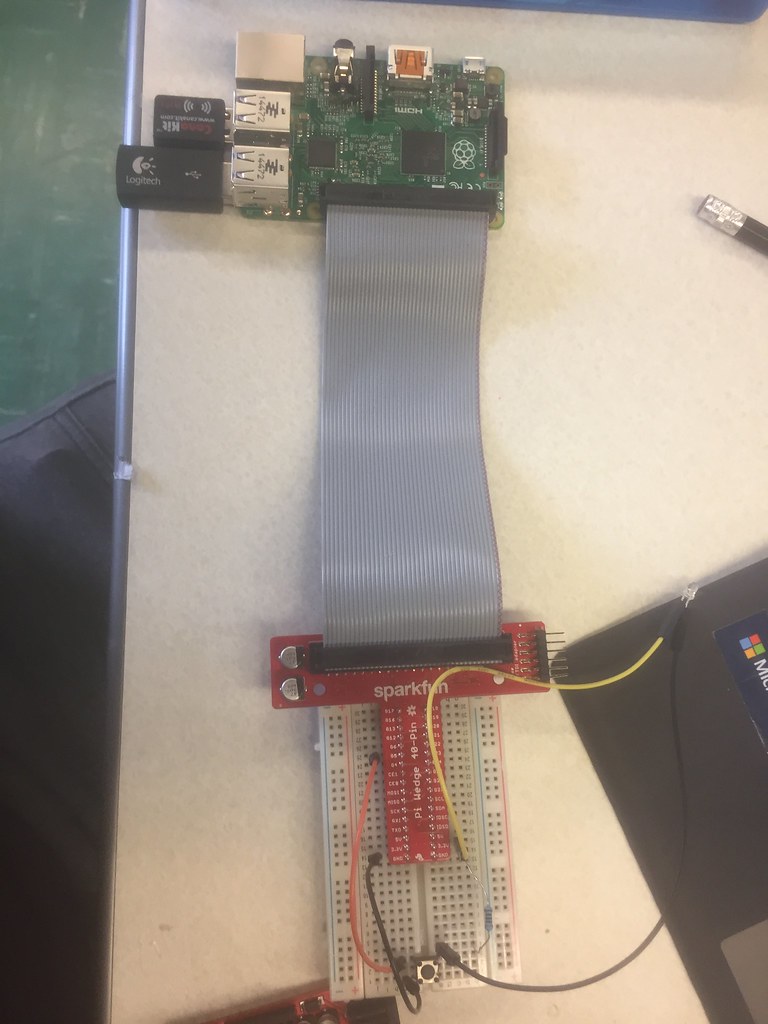
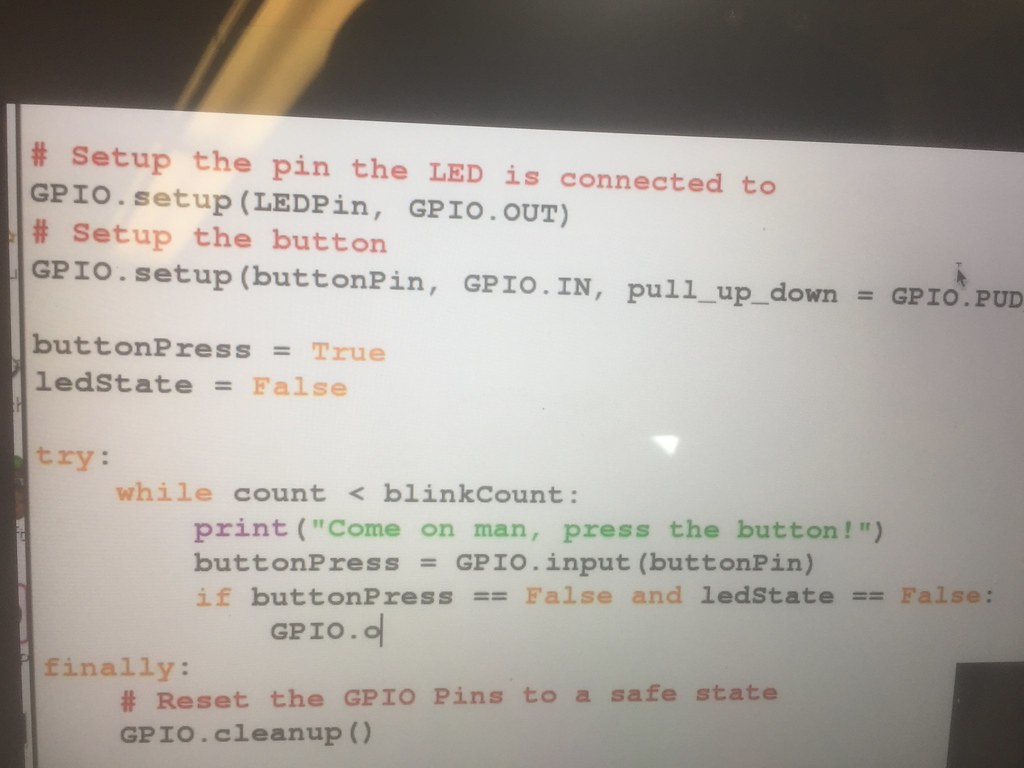
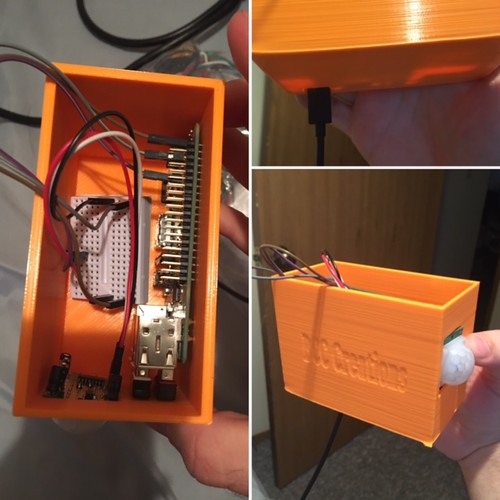
Our team was evaluated by JJJ Inc. They realized that our design was very complex, and overall they didn’t have a lot of suggestions for us. They understood that our prototype was already on track. However, they did suggest we should keep our ultrasonic transducer would be better than a button because an ultrasonic transducer would be more interactive and impressive. Our team was also evaluated by Professor Vishal. Professor Vishal told our team to focus more on the internal hardware versus the outerwear. Although Taofik is the one managing and coding for our project, Professor Vishal pushed and encourage Tiffany and me to understand the terms and functions of each of the technical components within our droid/bot.
After the evaluations, we continued to work on our projects. Many of the suggestions that both parties pointed out were important and logical. Obviously, as a team we need to take these suggestions into consideration and figure out if we will use these suggestions.


 The feedback allowed our group to think about our product from a different perspective, and to also consider situations that we had not though of when we originally came up with the idea. The feedback helped us think of our device in a much more user friendly way. As our entire class starts to finalize our products, I can certainly say that the feedback and testing phase of the project has been the most useful in how informative it has been
The feedback allowed our group to think about our product from a different perspective, and to also consider situations that we had not though of when we originally came up with the idea. The feedback helped us think of our device in a much more user friendly way. As our entire class starts to finalize our products, I can certainly say that the feedback and testing phase of the project has been the most useful in how informative it has been