 Ashraf Idkaidek
Ashraf Idkaidek
Department of Civil and Environmental Engineering
University of Illinois at Urbana-Champaign
idkaidek@illinois.edu
Robotic surgery is an alternative to traditional surgeries. It allows surgeons to perform complex surgical procedures using robotic arms. The advantages include small incisions, which lead to faster patient recovery time after surgery. However, since the surgeon has no direct contact with the tissue, visualization means are needed to ensure that cuts are made precisely. Modeling of tissue cutting can provide surgeons and medical students in training, with valuable insights into the deformations of tissues during cutting. Our long-term goal is to develop an accurate engineering simulation of robotic surgery of a human liver.
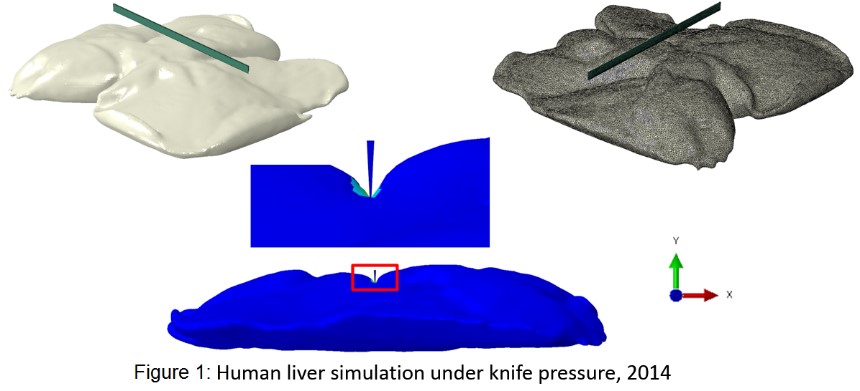 In this presentation, we illustrate our preliminary results on liver cutting simulation model involving a finite element method (FEM) using commercially available software, Abaqus. The model geometry was obtained from Magnetic Resonance Imaging (MRI) of a Porcine liver. The FEM mesh was generated using Simpleware software. The challenges include the modeling of knife/tissue contact, large deformations and nonlinearities, accurate constitutive models, and selection of an efficient algorithm for separation (cutting) of the tissue. We are initially considering an eXtended Finite Element Method (XFEM) and aim to evaluate differences between standard vs. explicit analysis schemes for this type of simulation. The constitutive modes involve nonlinear hyperelastic/viscoelastic mechanical properties. Future experiments are planned to fine-tune material properties inputs.
In this presentation, we illustrate our preliminary results on liver cutting simulation model involving a finite element method (FEM) using commercially available software, Abaqus. The model geometry was obtained from Magnetic Resonance Imaging (MRI) of a Porcine liver. The FEM mesh was generated using Simpleware software. The challenges include the modeling of knife/tissue contact, large deformations and nonlinearities, accurate constitutive models, and selection of an efficient algorithm for separation (cutting) of the tissue. We are initially considering an eXtended Finite Element Method (XFEM) and aim to evaluate differences between standard vs. explicit analysis schemes for this type of simulation. The constitutive modes involve nonlinear hyperelastic/viscoelastic mechanical properties. Future experiments are planned to fine-tune material properties inputs.
This study represents the Ph.D. thesis topic of Ashraf Idkaidek under the supervision of Professor Iwona Jasiuk, MechSE.
References:
- Maren Freutel, Hendrik Schmidt, Lutz Dürselen, Anita Ignatius, Fabio Galbusera, “Finite element modeling of soft tissues: Material models, tissue interaction and challenges.” Clinical Biomechanics, Vol. 29, pp. 363–372, 2014.
- Costin D. Untaroiu, Yuan‐Chiao Lu, Andrew R. Kemper, “Modeling the biomechanical and injury response of human liver parenchyma under tensile loading.” IRCOBI Conference, IRC-13-86, 2013.
- Andrew R. Kemper, Anthony C. Santago, Joel D. Stitzel, Jessica L. Sparks, and Stefan M. Duma, “Biomechanical response of human liver in tensile loading.” Ann Adv Automot Med. Vol. 54, pp. 15-26, 2010.
Ashraf Idkaidek is a Ph.D. student in Structural Engineering at the University of Illinois at Urbana-Champaign, and a senior structural engineer at Caterpillar, Inc. He received his Master’s degree in Structural Engineering from Bradley University in 2005, and performed postgraduate studies focusing on computational mechanics at UIUC from 2011 to 2014. He also has over nine years of industrial experience in the field of structural analysis using finite element method.