The smart transportation is expected to expand to a hundreds of billions market by 2020, and is revolutionizing our daily life. To name a few, the Maps (e.g., google, apple) provide the real-time traffic estimation and shortest route navigation; the trip-sharing companies (e.g., Uber, Lyft) provide convenient and price-friendly taxi services; and the emergent of self-driving cars is shifting our transportation paradigm. Those rapid changes in transportation opens up tremendous opportunities as well as challenges. I am deeply interested in this area and have been working related projects.
Representative projects I have worked on are summarized as follows:
- Development of a low-cost and energy-efficient wireless sensor network for vehicle detection and speed estimation using low-resolution passive infrared cameras (PIR) and ultrasonic sensors.
- State estimation of nonlinear systems with application in traffic flows composed of both mixed human-driven and autonomous vehicles.
- Development of mathematical traffic models on networks for optimal traffic management using convex optimization and Hamilton Jacobi partial differential equations.
Wireless Sensor Network for Traffic Monitoring
Keywords: Passive infrared sensors, ultrasonic sensors, IMU, LIDAR, Cameras, GPS, sensor networks, traffic monitoring
Source Code (under development): https://github.com/Lab-Work/Traffic_Sensors_Algorithms
Background: In a safety-critical environment where the GPS traffic data may not be available, such as work zones, a sensor network is necessary to collect the real-time traffic data which can be used to disseminate safety-critical messages to travelers (e.g., “queue ahead”). However, the existing sensors used in work zones are commonly expensive and difficult to deploy. This goal of this project is to develop low-cost and energy-efficient sensors which can be deployed at a denser spacing without additional total cost.
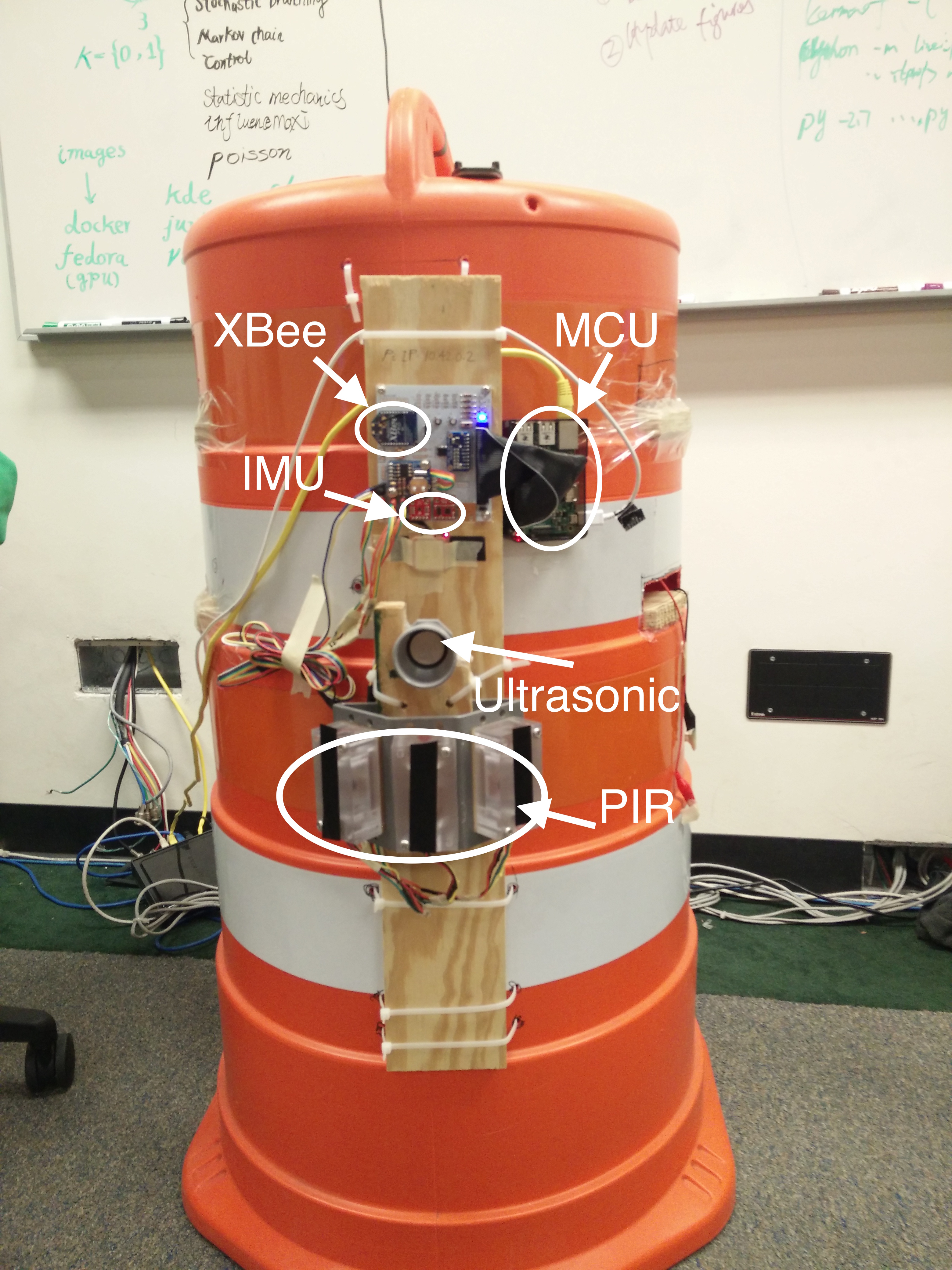
Currently, we have been integrating the following types of sensors in the traffic sensing platform:
- Passive infrared (PIR) cameras with a combined 48×4 resolution
- Ultrasonic sensor
- Laser range finder
- Video camera for collecting ground truth data using vision processing algorithms
- Accelerometer, gyroscope, and magnetometer
- GPS
The PIR detects the heat of vehicles and the ultrasonic sensor measures the distance to the vehicle for more accurate estimation of the speed. As shown in the following video, as the vehicles passes by, the PIR captures the vehicle as a moving cluster of hot pixels. After unraveling of the PIR data and background subtraction, the heat trace of each vehicle shows up on the heat map where machine learning techniques are used to fit lines whose slope indicates the vehicle speed. The ultrasonic sensor data is used to improve the speed estimation accuracy and improve the robustness of vehicle detection. For more details on the unsupervised algorithm, please refer to Machine Learning tab under Research.
Modeling and Estimation of Mixed Human-driving and Autonomous Vehicles
Keywords: Traffic modeling, Traffic estimation, Particle filtering, Ensemble Kalman filter, Sensor fusion, Autonomous vehicles, Nonlinear and distributed parameter systems, Partial differential equations
Source Code: https://github.com/Lab-Work/AIMSUN_with_AVs , https://github.com/Lab-Work/IDOT-SmartWorkzone (a separate repo for traffic estimation using ensemble KF)
With the emergent of self-driving cars, traditional traffic models and estimators are failing due to the distinct driving characteristics of self-driving cars (e.g., significantly smaller reaction time and headways). Therefore, there is an urgent need to new methods that can model and estimate mixed traffic. This project proposed to use a nonlinear particle filter with a two-class macroscopic model for estimating mixed traffic states.
A nonlinear particle filter is used to develop the traffic estimator using the two-class traffic model. The performance of the proposed estimator is compared with the classic first order macroscopic traffic model in a microsimulation environment.
In addition to this project, I also worked on a project in collaboration with IDOT on evaluating smart work zone systems in micro-simulation environment. In this work, I implemented ensemble Kalman filter to estimate the traffic conditions using simulated traffic data. A preprint of the paper can be found here.
Optimal Traffic Control on Networks
Keywords: Traffic modeling on networks, Convex optimization, Optimal on-ramp metering control, Hamilton Jacobi partial differential equations
Source Code: https://github.com/Lab-Work/TEC_COF
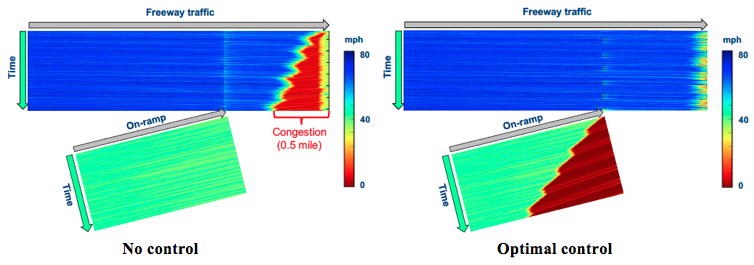
The primary problem to address in this project is: given the real-time traffic data and limited road infrastructure, what is the optimal traffic management strategy that minimizes the traffic congestion and travel time.
The following figure shows an example of such optimal controller. On a freeway, the merging behavior of vehicles from onramps can cause capacity drops and hence congestions. For the global optimality, it is more beneficial to keep vehicles waiting on the onramp for a while to keep the freeway uncongested. The waiting time of vehicles on the onramp will be compensated by uncongested traffic on the freeway later. The proposed optimal traffic controller is capable of predicting the traffic conditions and computing the optimal onramp metering strategy such that the onramp flow is maximized while keeping the freeway uncongested.
The current state of the project is to generalize the convex program formulation to a mixed integer linear programming which can be easily applied to arbitrary large scale network for efficient and optimal traffic management.