Unmanned Aerial Vehicle for Flood Prediction
Keywords: UAV, sensor fusion, IMU, Pitot tube, ultrasonic sensor, barometer, GPS, XBee telemetry, Ardupilot, Gumstix microcomputer, MAVLINK communication protocol, Embedded linux system
Flood is one of the natural disasters that could cause fatality and significant economic loss. Generally, it is very hard to predict the flood and take actions accordingly due to the lack of sufficient real-time data. This project aims at the development of an UAV which is capable of collecting real-time flood data in adverse weather conditions.
The approach of the project is to use the UAV to deploy a large number of floating sensors, which could broadcast its position and speed in the water flow continuously in real time. Then these data can be incorporated into the mathematical models to predict the flood flow.
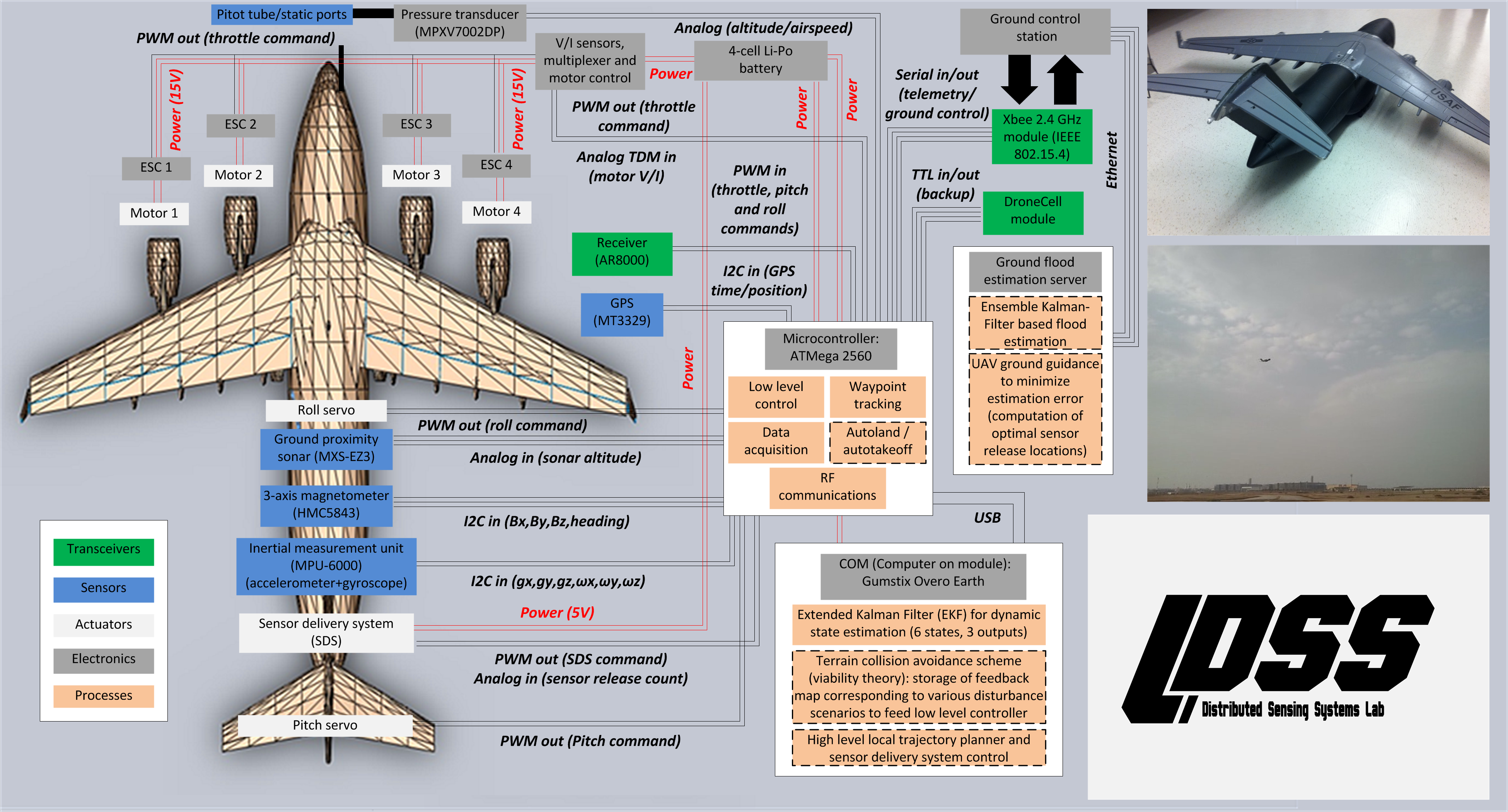
I was involved in the early development stage of the UAV. We developed a prototype using open source softwares and commercially available hardware (Arduino, etc.). Specifically, I worked on the following tasks:
- Integration, testing, and calibration of a variety of sensors, including IMU, magnetometer, ultrasonic sensor, GPS, and XBee.
- Integration of motors, servos, and micro-controllers (Gumstix and Arduino).
- Modification and tuning of the low-level flight controller based the open source Ardupilot program.
Robotic arm for lunar soil sampling
Keywords: 3D modeling and visualization, Stress analysis, Kinematic analysis, Motion simulation, Adaptive trajectory planning, multiple functional sampling hand, embedded drill system
China is developing its space program rapidly in recent years. The most representative example is the Chinese Lunar Exploration Program. The Phase One (Orbital missions) and Phase Two (Soft landers/rovers) have achieved tremendous scientific accomplishment. The goal of the third phase is to return lunar soil samples, which requires a robotic arm and a drill system.
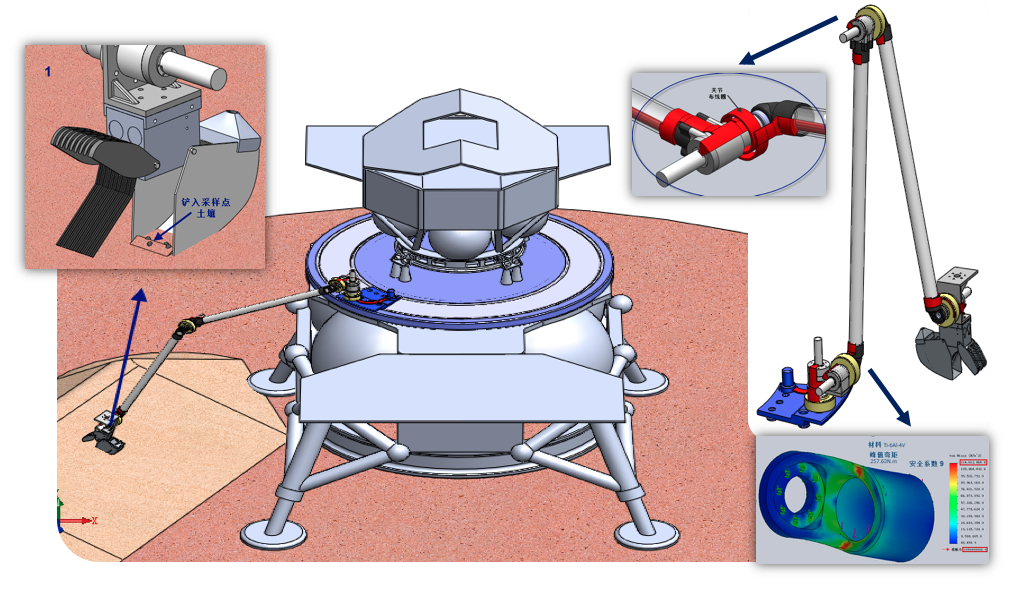
This project was my undergraduate thesis project, which designed a five degrees of freedom robotic arm and a soil particle separation sampling gripper for the lunar lander. The designed robotic arm and gripper were presented and submitted to the China National Space Administration in Beijing. Two patents are granted for the design during the project.
A robotic harvester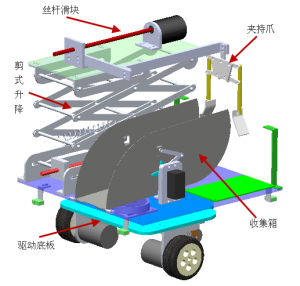
My interest in robotics starts from the robotics competition in Zhejiang University in my junior year. The task of the competition was to harvest as many ‘fruits’ as possible from ‘tree branches’, and transport them to the collection area.
I participated the competition with two teammates from electrical engineering and control theory. My responsibility was to design and fabricate the mechanical structure of the robot. We won the 2nd prize out from 40 participating teams.
It was my first hand-on project on robotics and one of the best teamwork experiences, and I will always be proud of what we achieved.