- Inversion based feedforward control
Feedforward control utilizes the knowledge of the exogenous signals (references or/and disturbances) and plant dynamics to influence the system outputs and minimize effects of the exogenous signals. Usually it is added to a feedback controller providing a two DOF controller. The essence of feedforward control is to make the inversion of the plant dynamics (Skogestad and Postlethwaite 2005). Such a feedforward controller can be non-causal, using previewed exogenous signals to generate compensating input signals (Zou and Devasia 1999). However, perfect compensation by the feedforward input is usually not achievable in practical real systems due to two factors: the mismatch between the model and the real plant dynamics and the inaccuracy in the signal information. We define these factors as model uncertainty and signal uncertainty, respectively.
- Robust feedforward controller design for SISO time-delayed system
When the system has neither model uncertainty nor signal measurement uncertainty, the feedforward controller can provide perfect tracking performance without any bandwidth limitation. However, uncertainties are natural occurrences in most control problems and will affect the performance of a given feedforward approach. As stated, the uncertainties fall into two categories: models and measurements. The uncertain models occur due to un-modeled dynamics or uncertain parameters in a system representation. Uncertain measurements can occur due to sensor calibrations, sensor bandwidth limitations, sensor saturations, noise, etc. Most of previous excellent work in the field has focused on feedforward controller design with model uncertainties .However, the effect of measurement uncertainty has received less research attention for designing feedforward controllers. This may be due to the fact that the feedforward terms are assumed to be generated by reference commands and not by measureable exogenous signals, with their associated uncertainties.

Figure 1 Framework for SISO two DOF control system
We develop a robust two degree-of-freedom controller in ref 5 and ref 6 with system structure shown in Figure 1. A H∞feedback control method is used to ensure the robustness and obtain desirable closed loop sensitivities for the feedback controller design. Specifically, the numerical optimization for irrational system with delay is discussed. Subsequently, we analyze the feedforward control error introduced by both model uncertainty and measurement uncertainty, which reveals a relationship between nominal feedforward performance, in the ideal case with no uncertainties, and errors introduced when measurement uncertainties are considered. The measurement uncertainty is characterized in the frequency domain and a H∞control problem is constructed to balance the trade-off between performance and sensitivity to uncertainty. With feedback controller and feedforward controller both considered the uncertainties, the work provides improved robust performance to both model and signal uncertainty.
- Robust feedforward controller design for MIMO system

Figure 2 Framework for MIMO two DOF control system
Due to the difficulty of obtaining an explicit expression of model inversion for a MIMO system, robust feedforward control for MIMO systems usually use a diagonal transfer function matrix to approximate the plant dynamics. Therefore, it is important to find the diagonally dominant matrix that best represents the plant dynamics. we propose a pre-compensator and post-compensator framework to make the diagonal entries contain the dominant poles as shown in Figure 2. This method allows a designer to include specific poles in the diagonal matrix, which is intuitively straightforward to implement. The research work in Ref 6 is extended to MIMO system in Ref 7 to ensure desirable robust performance of the two DOF control system with both model uncertainty and signal uncertainty considered.
- Application on vehicle-environmental interaction system
The work has been applied on the HHC problem with experimental setup shown in Figure 3. The experiments are conducted on a John Deere S690 combine with a 612C corn header. The experimental system includes a dSPACE AutoBox for real time control implementation, an integrated AutoTrac tracking system (GPS receiver and display) and a computer acting as a user interface. The dSPACE system allows prototyping of the controllers within the Simulink environment and implements the controllers to construct a hardware in the loop system using the Digital Signal Processor (DSP). The control algorithms can be tested in the dSPACE by exchanging sensor signals and operating signals with the exciting hardware system, in this case the combine harvester, through the CAN bus and other analog inputs. For HHC the control signal is sent to the hydraulic valves by analog outputs from the dSPACE system. The sample time of for dSPACE and CAN bus system is 0.005s. The measurement of the GPS system has a relatively low updating frequency of 5Hz, which is interpolated between samples when used to determine the location of the current combine system. With the combine position provided by the real-time measurement of the GPS system, the combine can be accurately located in the pre-measured field map. The pre-measured and stored information regarding the ground profile directly ahead of the combine can then be extracted from stored maps and used for the feedforward control.The robust 2 DOF controller design is tested in a combine system, which results in 10 times improvement of combine speed when it is working on a test field as shown in Figure 5. Check out the video below when I drove the combine doing the experiments.
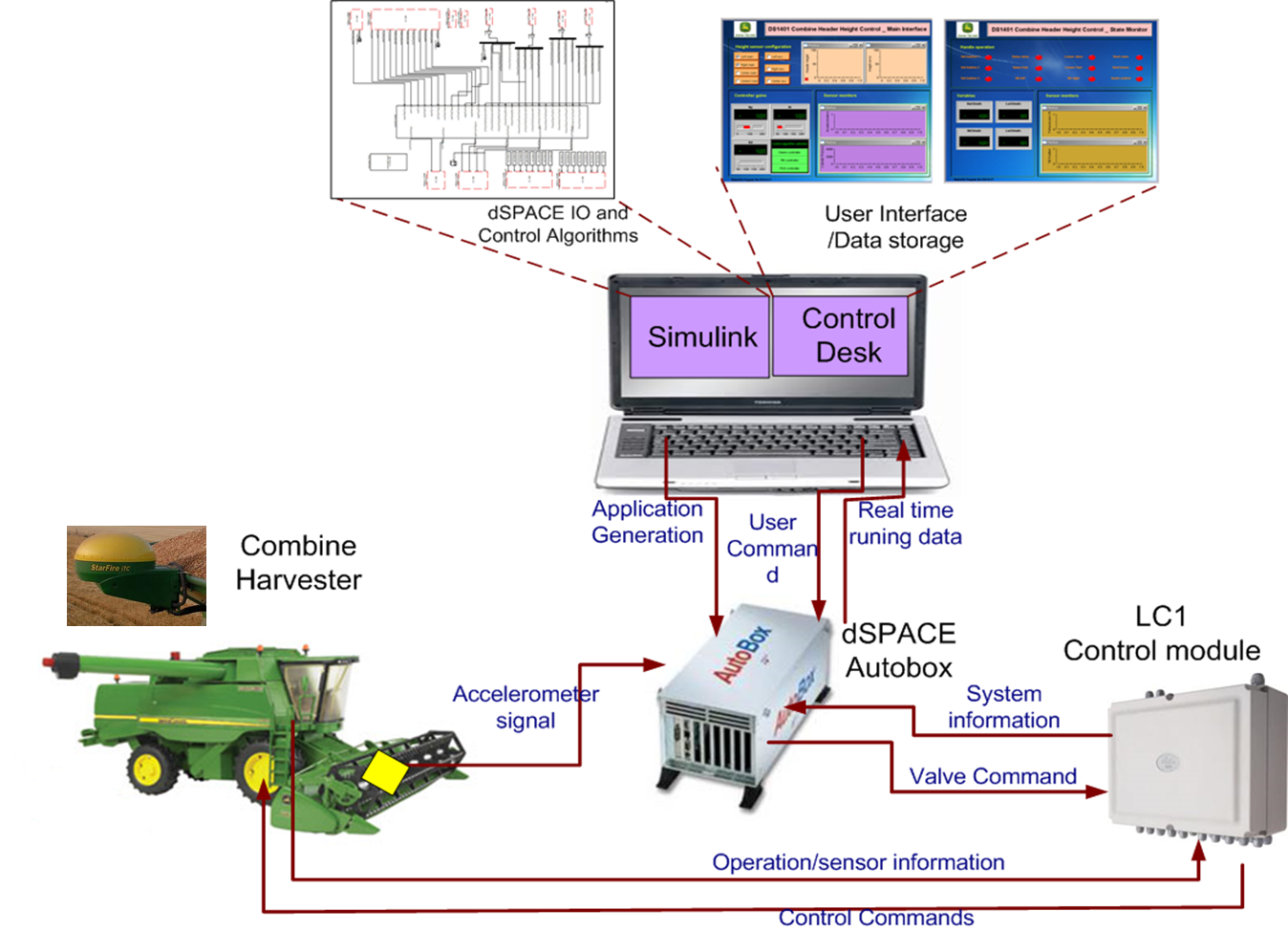

Figure 3 Experimental Setup
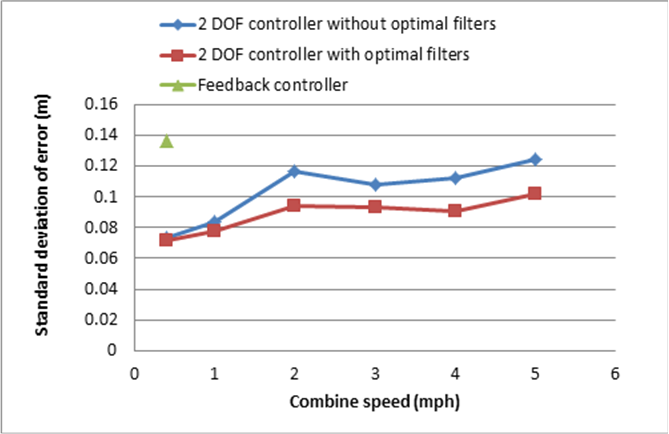
Figure 4 Performance improvement on a full scale combine