- Fundamental control limitations
The growing demand for tighter production tolerances, higher trajectory accuracy and higher productivity leads to the stringent requirements on the performance of mechatronic systems. Consequently, mechanical system design, including mechanism, sensor and actuator development and placement, parameter design, etc., and active control for robotic system, such as adaptive control, robust control, cooperative control, etc., have been extensively studied to satisfy different task requirements.
Although both design and control place important roles in determining the system performance, they are generally separated in study. The topology and dimension of the mechanical structure are designed with the consideration of tasks, workspace, actuation ability and frequency spectrum properties. On the other hand, the controller is generally designed for a well-defined robotic system with fixed mechanical structure, in another word, with fixed system dynamics, to pursue certain motion/force control performance. Because of such separation, some characteristics that are considered beneficial from a mechanical design point of view may actually be detrimental from a control point of view.
Therefore, we define the limitation from the physical system dynamics on achievable control performance as fundamental control limitations. Model uncertainty, non-minimum phase zeros, signal uncertainties, actuator delays are commonly found limiting factors for LTI system. We summarize their effect on general control frameworks in Ref 1. Particularly, the limitations for vehicle-environmental interaction systems are studied in Ref 2.
- Integrated Design and Control
For the purpose of moderating such the control limitations, in mechatronic area research work has been done to make decisions in the design phase with the help of control concept and algorithm, which is called integrated design and control with the research scope shown in Figure 1. Although recognized as important and influential work, the research on integrated design and control has not received massive research attention. One of the possible reasons is due to the highly complicated and nonlinear relationship between system design and plant dynamics characteristics. Another reason is that control performance is not the only consideration, sometimes even not the most important consideration, when designing the structure of a robotic system.
In our research , we focus on the systematic approach and application for the parameter design and control integration, which is to optimize key parameters and controller design with numerical optimization approaches. In the formulation of the optimization problem, the restriction on the parameters from other design considerations can work as constraints for the variables. This method has been studied in both time domain (Ref 3) and frequency domain (Ref 4).

Figure 1 Research scope of integrated design and control
- Application on vehicle-environmental interaction systems

Figure 2 Systems with vehicle – environment interaction
Vehicle – environment interactions usually occur for the mechanical vehicle systems with some apparatus attached for a specific purpose. Figure 2 illustrates several examples of vehicles that interact with an environment. The vehicle functions as a carrier, and the apparatus is controlled by actuators to interact with the environment for the purpose of precisely accomplishing a certain task. Whilst the vehicle is manipulating the particular apparatus, the dynamics of the vehicle are influenced by the environment as it is proceeding over some ground or water surface.
The vehicle – environment interaction during the working process in these systems can largely influence working efficiency by introducing an unknown reference (the terrain profile) or disturbances (the terrain profile exciting the vehicle dynamics) to the systems. Some environmental conditions can be pre-measured, such as the terrain shape ahead of a mining vehicle via LIDAR; some others may be hard to access, such as the waves or currents under a crane ship. Another potential challenge for precisely controlled operation is that the vehicle systems themselves, in many cases, are under-actuated and non-collocated systems, which becomes a potential challenge for effective feedback control. In addition, due to the heavy load nature of most tasks, the actuator system, mostly hydraulic system, cause considerable delay in the system response which induces additional bandwidth limitation for feedback control (Ref 2).
One example of the vehicle – environment interaction system, the combine harvester (called combine for short below), is studied. Figure 3 provides both a photograph and a simplified schematic of this system in the vertical plane. And Figure 4 shows the improvement of zero pole locations of the physical systems. The resulted bandwidth limitations is improved from 1 Hz to 2.3Hz, which resulting an improvement in the time domain step response as shown in Figure 5.
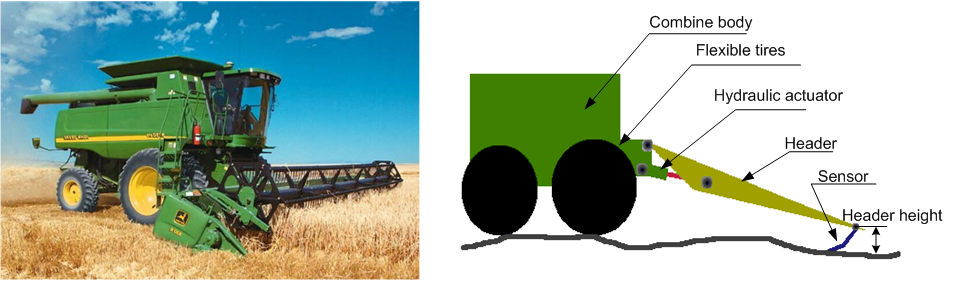
Figure 3 Combine System
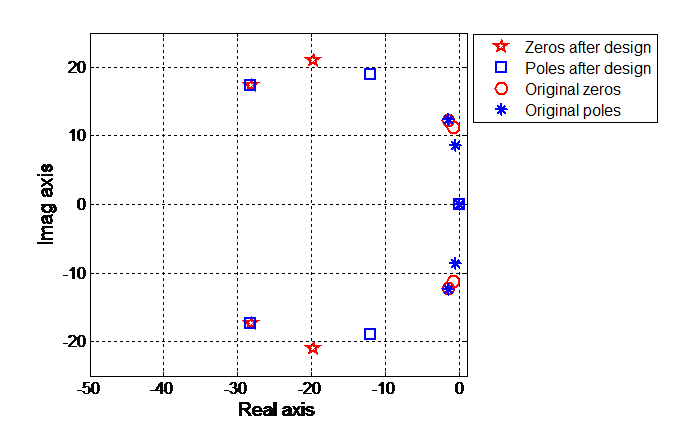
Figure 4 Pole and zero position comparison between original and designed systems
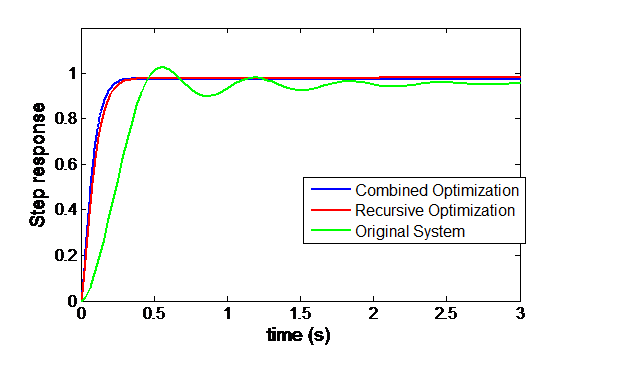
Figure 5 Step response comparison between original and designed systems