
HOPPY is an open-source, low-cost, robust, and modular kit for robotics education.
Here you’ll find all that is needed to build and control the robot. From the CAD, wiring diagram, mechanical assembly, control strategies, and more:
https://github.com/RoboDesignLab/HOPPY-Project
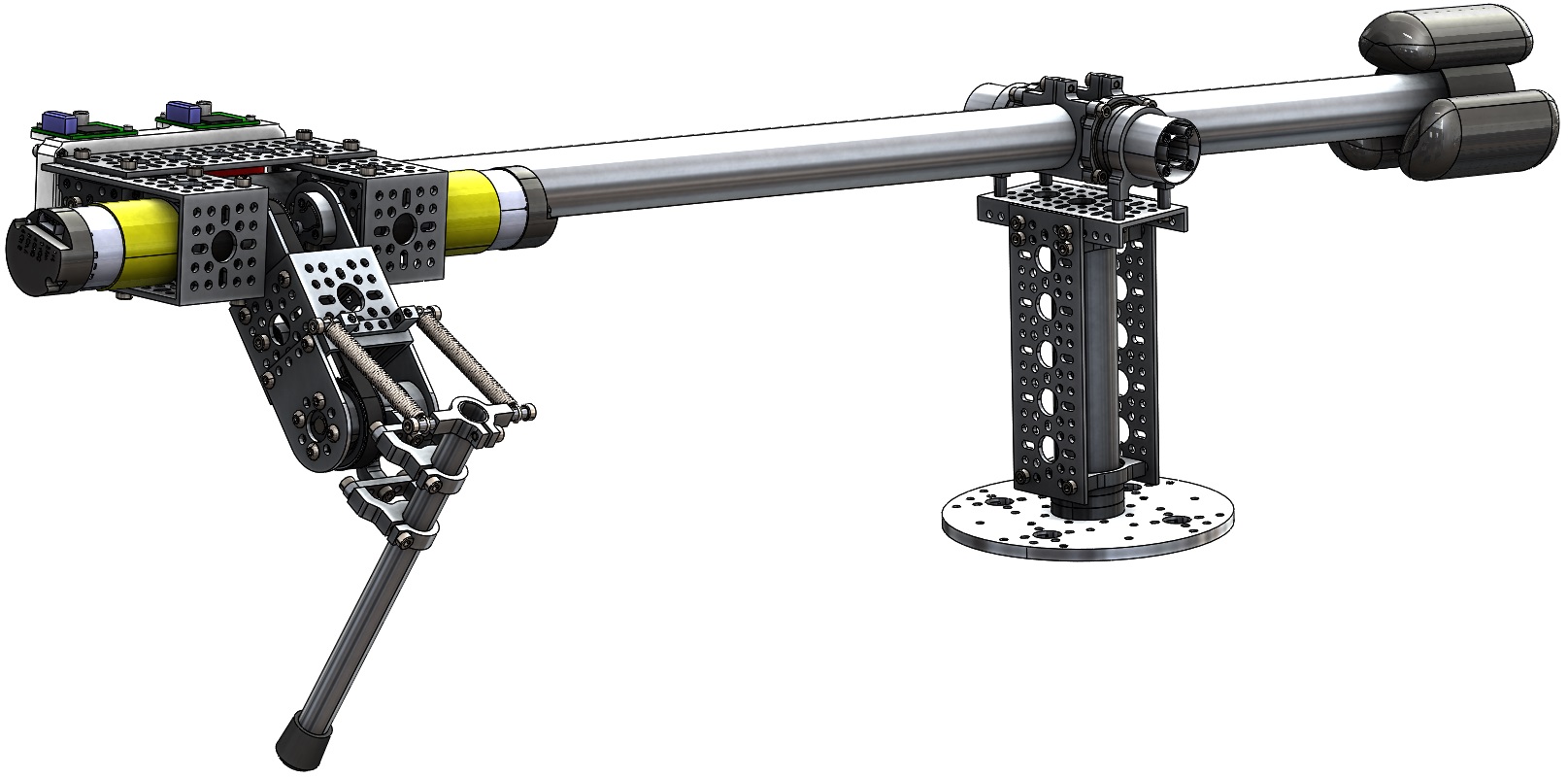
The robot dynamically hops around a fixed gantry. The kit targets lowering the barrier for studying dynamic robots and legged locomotion in real systems. Controlling dynamic motions in real robots present unique challenges to the software and hardware which are often overlooked in conventional robotics courses. This project describes the topics which can be studied using the kit, lists its components, discusses best practices for implementation, presents results from experiments with the simulator and the real system, and suggests further improvements. HOPPY was utilized as the topic of a semester-long project for the Robot Dynamics and Control course at the University of Illinois at Urbana-Champaign. Students provided a positive feedback from the hands-on activities during the course and the instructors will continue to develop and improve the kit for upcoming semesters.
Find out more in our overview paper: https://arxiv.org/pdf/2103.08433.pdf