
Our paper “Teleoperation of Humanoid Robots: A Survey“, an international collaboration between multiple researchers including Prof. Ramos, has been accepted for publication at the IEEE Transactions on Robotics journal. The paper originated from discussions during a workshop on teleoperation of humanoid robots that occurred back in 2019.
Category Archives: Uncategorized
The RoboDesign Lab has been awarded with $1.2M to create the next generation of dynamic humanoid robots
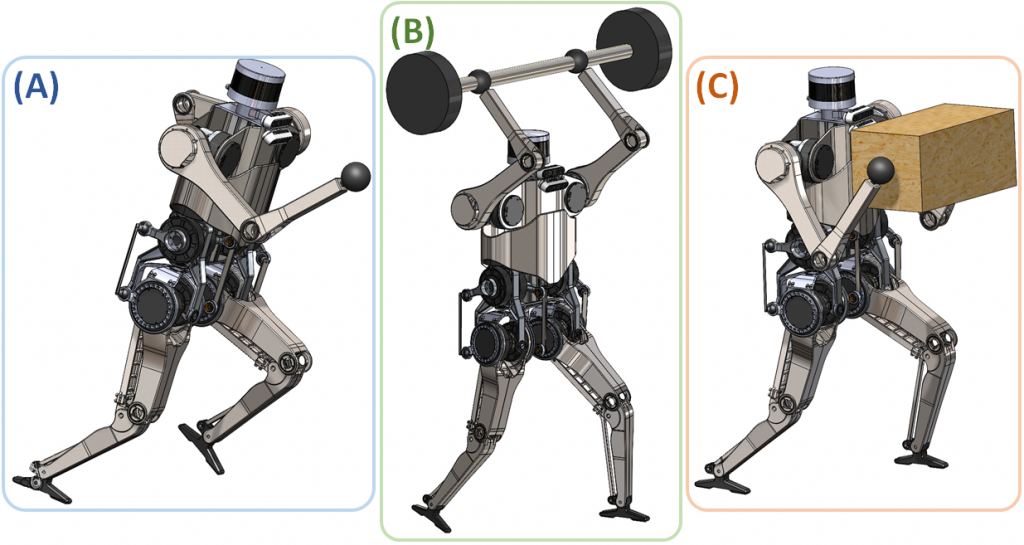
The RoboDesign Lab has been awarded with $1.2M by NSF’s NRI 3.0 program to develop a design framework to create the next generation of dynamic humanoid robots. The project is led by Prof. Ramos and in a collaboration with Prof. Patrick Wensing from the University of Notre Dame, Prof. Donghyun Kim from the University of Massachusetts Amherst, and Prof. Justin Yim, who is joining UIUC in January 2023. The project will create the open-source humanoid robot Dash, designed to be highly athletic but also accessible to other research groups. Stay tuned!
Three papers accepted to IEEE/RSJ IROS 2022!
Our papers:
“Tello Leg: The Study of Design Principles and Metrics for Dynamic Humanoid Robots” 2022. Video: https://youtu.be/mn8tCtYHzHI
“Hands-free Telelocomotion of a Wheeled Humanoid toward Dynamic Mobile Manipulation via Teleoperation” 2022. Video: https://youtu.be/aY3463d03Ks
will be presented at IEEE/RSJ IROS 2022 in Kyoto!
Congratulations, Marty, Donghoon, and Youngwoo!
Paper accepted to RAL!
Our paper “Tello Leg: The Study of Design Principles and Metrics for Dynamic Humanoid Robots” was accepted for publication at IEEE Robotics and Automation Letters! Congrats, Youngwoo!
Check the leg here: https://youtu.be/mn8tCtYHzHI
Come see us at Dynamic Walking 2022!
Our lab will be presenting the design of Tello and demonstrating the leg (https://youtu.be/mn8tCtYHzHI) during the Dynamic Walking conference at Winsonsin (https://dynamicwalking.engr.wisc.edu/). Please stop by to say hello and chat about humanoid robots!
RoboDesign receives award from US Army ERDC/CERL!
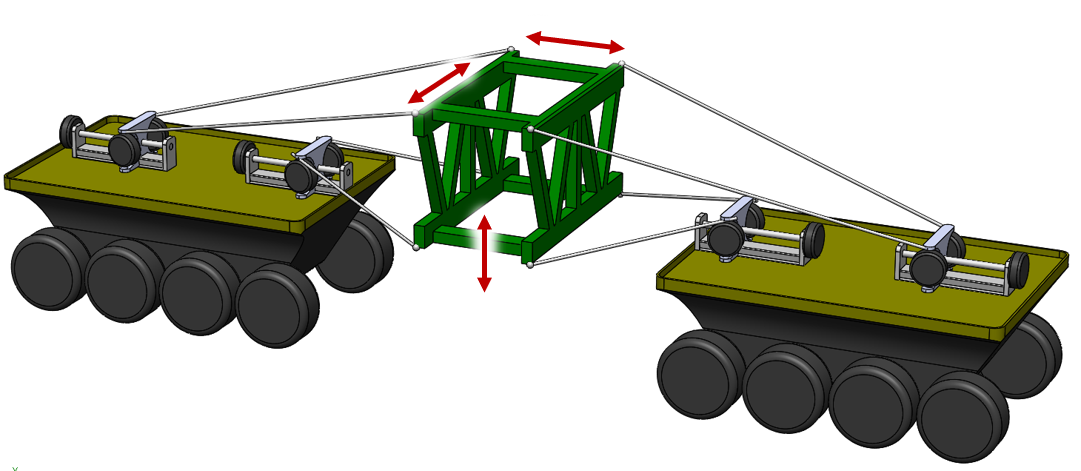
We are excited to announce a new research project funded by the Construction Engineering Research Laboratory (CERL) to study and develop modular robots for cable driven cooperative manipulation of cumbersome objects.
Dr. Yeongtae Jung is now Assistant Professor!
Dr. Yeongtae Jung recently joined Jeonbuk National University in South Korea as Assistant Professor. Congratulations, Prof. Jung!
Prof. Luis Sentis visits the RoboDesign Lab
Last week we hosted Prof. Luis Sentis from UT Austin.
Prof. Sentis gave a seminar entitled: “Trajectory Generation, Tracking, and Augmentation in Human-Centered Robots”
Thank you for the visit and a great talk, Luis!
Paper accepted to RA-L!
Our paper “Dynamic Locomotion Teleoperation of a Reduced Model for Wheeled Humanoid Robot Using a Whole-Body Human-Machine Interface” has been accepted for publication at Robotics and Automation Letters (RA-L). The paper will be presented at ICRA 2022. Congrats, Sunyu!
Google Gift 2021
Our lab is honored to receive a gift from Google to investigate the development of a high performance haptic device for telemanipulation. The project is entitled “A high-force haptic device for whole-body Power Manipulation with humanoid robots”