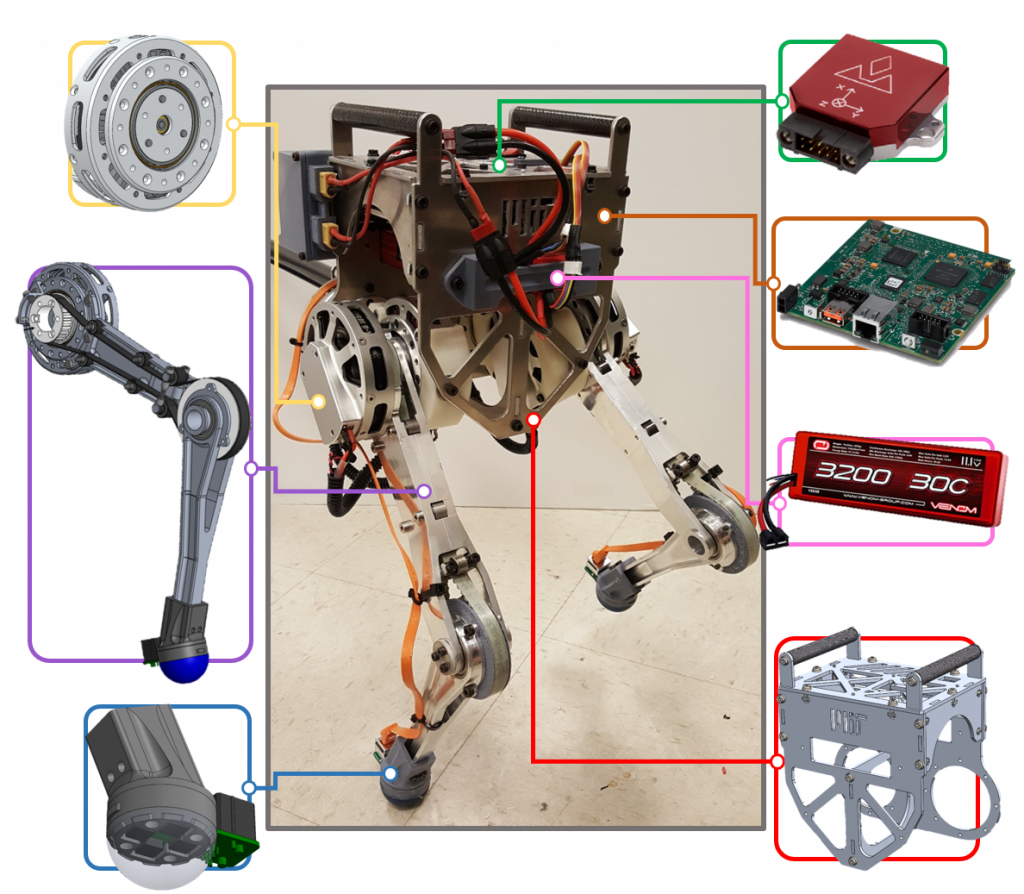
Little HERMES is a small-scale bipedal robot designed for studying balancing strategies. Due to its small size, it is inherently safer to perform experiments than the full-scale robot HERMES. Each leg is torque controlled, highly backdrivable and has 3 DoF. All the actuators are mounted proximal to the body, reducing leg inertia and CoM dependency on leg configuration.

Little HERMES System got 3rd place at the 2018 MIT Mechanical Engineering de Florez Award Competition, Graduate Design category.
Check Little HERMES featured at Big Blue Saw here!
Thanks, Sam Ingersoll, for the animation. The custom actuators and drivers are designed by Ben Katz. The point-feet are custom 3-axis force sensors and are based on the technology developed by Michael Chuah.