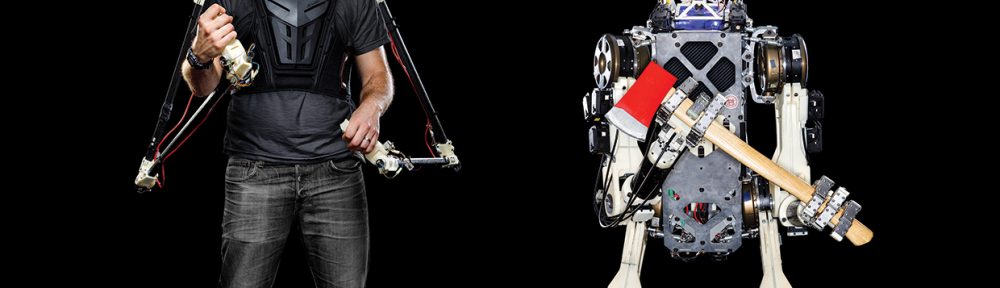
The MIT HERMES humanoid robot system is designed for studying whole-body human-in-the-loop control with balance feedback. Inspired by the innate physical control capabilities of humans as well as the capacity for creative learning, we explore the use of the full-body of the human operator as the controller for a humanoid robot.

Picture: Bob O’Connor
MIT HERMES System got 2nd place at the 2015 MIT Mechanical Engineering de Florez Award Competition, Graduate Design category. And our team also placed 2nd at 2016 UAE Robotics for Good Award, in February 2016 in Dubai. An international robotics competition that included over 600 teams from all around the globe.
Publications:
[1] J. Ramos, and S. Kim, “Improving Humanoid Posture Teleoperation by Dynamic Synchronization Through Operator Motion Anticipation” in Robotics and Automation (ICRA), 2017 IEEE International Conference on. IEEE, 2017.
[2] J. Ramos, A. Wang, and S. Kim, “Robot-Human Balance State Transfer during Full-Body Humanoid Teleoperation Using Divergent Component of Motion Dynamics” in Robotics and Automation (ICRA), 2016 IEEE International Conference on. IEEE, 2016.
[3] J. Ramos, A. Wang, J. Mayo, W. Ubellacker, and S. Kim, “A Balance Feedback Interface for Whole-Body Teleoperation of a Humanoid Robot and Implementation in the Hermes System”, in Humanoid Robots, 2015 15th IEEE-RAS International Conference on. IEEE, 2015.
[4] A. Wang, J. Ramos, J. Mayo, W. Ubellacker, and S. Kim, “The HERMES Humanoid System: A Platform for Full-body Teleoperation with Balance Feedback”, in Humanoid Robots, 2015 15th IEEE-RAS International Conference on. IEEE, 2015
[5] J. Ramos, A. Wang, and S. Kim, “A Balance Feedback Human Machine Interface for Humanoid Teleoperation in Dynamic Tasks”, in Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on., IEEE, 2015.
The MIT HERMES Project was featured in many news and articles such as: MIT News, NBC News, Popular Science, IEEE Spectrum, Wired, Boston Herald, Boston Globe, Reuters, FOX News, O Globo, Business Insider, and many others.
The MIT HERMES Team. Left to right: Wyatt Ubellacker, João Ramos, John Mayo, Albert Wang and Prof. Sangbae Kim.
