There is a need for agile, powerful, and energy-efficient robotic systems for defense, agriculture, and health applications. Insects, which occur in almost every habitat on earth, are known for their speed and maneuverability and they provide excellent solutions and inspiration for the next generation of robotic systems. The maneuverability observed in insects is enabled, in part, by sophisticated energy storage and release processes involving architectured materials and structures. For instance, click beetles (Coleoptera: Elateridae) evolved a fast energy release mechanism of legless jumping for self-righting purposes. From an initially inverted position, click beetles jack-knife their bodies, catapulting into the air and landing back on their feet. Our research works on understanding and mimicking the power amplification strategy click beetles employ to release fast bursts of energy that allow them to accelerate from a completely stationary position to a ballistic motion.
In nature, click-beetles use a unique hinge structure between their prothorax and mesothorax that acts as a power amplifier to produce a high acceleration while jumping. This structure enables them to jump the height of several times their body length without using legs. In addition to investigating the material, interior, and exterior properties of the hinge structure, it is necessary to study beetle jump trajectories to inform the design of novel jumping mechanisms.
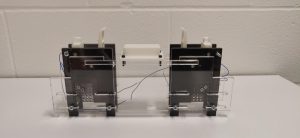
For better control over variables, we designed a special launching platform and simplified beetle prototypes to simulate the latching and release of the hinge. This launcher design uses a quick-reaction release mechanism and magnetic actuator to simulate the unlatching process and uses a spring to simulate the stored elastic energy.
Through the design of different simplified prototypes, we can compare the jumping trajectories of live click beetles and constructed prototypes with different geometric, material and inertia properties.

This study will help reveal how variables such as center of mass, spring elasticity, elytra curvature, weight, and body length affect the beetles’ jumping capability. Our findings provide further insight into design and fabrication of legless jumping robotic mechanisms.
Project Lead
- Liyuan Zhang – MechSE – University of Illinois at Urbana-Champaign
Collaborators
- Teagan Mathur – Mechanical and Aerospace Engineering – Princeton University
- Yuhe Cui – MechSE – University of Illinois in Urbana – Champaign
- Dr. Aimy Wissa – Mechanical and Aerospace Engineering – Princeton University
- Dr. Alison Dunn – MechSE – University of Illinois at Urbana-Champaign
- Dr. Jake Socha – Department of Biomedical Engineering and Mechanics – Virginia Tech
Publications
- Insect-Scale Jumping Robots Enabled By A Dynamic Buckling Cascade. 2022. Yuzhe Wang, Qiong Wang, Mingchao Liu, Yimeng Qin, Liuyang Cheng, Ophelia Bolmin, Marianne Alleyne, Aimy Wissa, Ray H. Baughman, Dominic Vella, Sameh H. Tawfick. Proceedings of the National Academies of Sciences of the United States of America. V120(5), e22106511 DOI: 10.1073/pnas.2210651120
- Scaling of Jumping Performance in Click Beetles (Coleoptera: Elateridae). 2022. Ophelia Bolmin, Thomas C. McElrath, Aimy Wissa, and Marianne Alleyne. Integrative and Comparative Biology, V62, 1227-1234. DOI: 10.1093/icb/icac068.
- Nonlinear elasticity and damping govern ultrafast dynamics in click beetles. 2021. Ophelia Bolmin, John J. Socha, Marianne Alleyne, Alison C. Dunn, Kamel Fezzaa, and Aimy A. Wissa. Proceedings National Academy of Sciences. DOI: 10.1073/pnas.2014569118. (Related: Illinois News Bureau: Latch, load and release: Elastic motion makes click beetles click, study finds. Lois Yoksoulian, Published 18 January 2021)

- Latching of the click beetle (Coleoptera: Elateridae) thoracic hinge enabled by the morphology and mechanics of conformal structures. Ophelia Bolmin, Lihua Wei, Alexander Hazel, Alison C. Dunn, Aimy Wissa, and Marianne Alleyne. Journal of Experimental Biology V222(Pt 12). pii: jeb196683. Publication Date June 17, 2019. DOI: 10.1242/jeb.196683. (Related: IHollow peg holds key to click beetles’ explosive flips.
- Pop! Observing and Modeling the Legless Self-righting Jumping Mechanism of Click Beetles. Ophelia Bolmin, Chengfang Duan, Luis Urrutia, Ahmad. M. Abdulla, Alexander M. Hazel, Marianne Alleyne, Alison C. Dunn, Aimy Wissa*. In: Mangan M., Cutkosky M., Mura A., Verschure P., Prescott T., Lepora N. (eds) Biomimetic and Biohybrid Systems. Living Machines 2017. Lecture Notes in Computer Science, V10384. Springer. DOI: 10.1007/978-3-319-63537-8_4
