 Thenkurussi (Kesh) Kesavadas
Thenkurussi (Kesh) Kesavadas
Director of Health Care Engineering Systems Center
Department of Industrial and Enterprise Systems Engineering
University of Illinois at Urbana-Champaign
kesh@illinois.edu
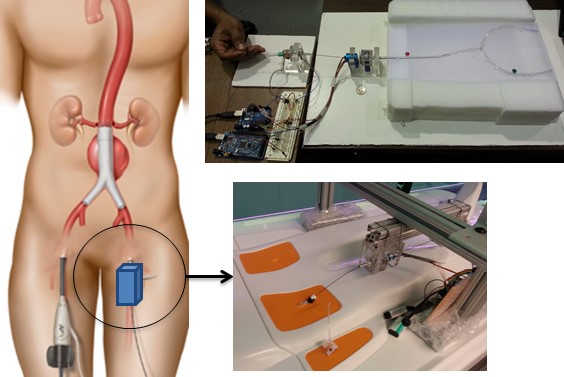 Minimally invasive surgeries often involve insertion of image guided flexible surgical tools. Over exposure to radiation and contrast dye is common because of the lack of reliable visual feedback in many procedures, which required delicate touch of the surgeon. In this research we are developing a system that improves safety of insertion by a semi-automated force feedback enabled system that assists surgeons. Our group has developed two versions of this technology, one for endovascular guide wire insertion and the second for needle biopsy of spine. The proposed system actively monitors the tool insertion process and measures and amplifies resistance sensed by the surgeon through haptic feedback. Further, the automated robotic system is capable of providing range of harmonic vibrations to improve the insertion process. Our system is also capable of stopping device from deploying if a sudden change of pressure is detected (e.g needle transitioning from bone to soft tissue during needle biopsy) and scaling the insertion force. Prototype of the proposed systems is currently being tested on vessel and spine phantoms and virtual simulator.
Minimally invasive surgeries often involve insertion of image guided flexible surgical tools. Over exposure to radiation and contrast dye is common because of the lack of reliable visual feedback in many procedures, which required delicate touch of the surgeon. In this research we are developing a system that improves safety of insertion by a semi-automated force feedback enabled system that assists surgeons. Our group has developed two versions of this technology, one for endovascular guide wire insertion and the second for needle biopsy of spine. The proposed system actively monitors the tool insertion process and measures and amplifies resistance sensed by the surgeon through haptic feedback. Further, the automated robotic system is capable of providing range of harmonic vibrations to improve the insertion process. Our system is also capable of stopping device from deploying if a sudden change of pressure is detected (e.g needle transitioning from bone to soft tissue during needle biopsy) and scaling the insertion force. Prototype of the proposed systems is currently being tested on vessel and spine phantoms and virtual simulator.
Thenkurussi Kesavadas is the Director of Health Care Engineering Systems Center at the University of Illinois at Urbana-Champaign. Before coming to Illinois, Kesavadas was a professor in the Department of Mechanical and Aerospace Engineering at the University at Buffalo (NY), where he founded the University at Buffalo Virtual Reality Laboratory. He received his doctoral degree from the Pennsylvania State University in 1995. Kesavadas has been in the forefront of Virtual Reality and its application to medicine since 1993, when this field was still in its infancy. In 2004, Dr. Kesavadas was honored as the “Inventor of the Year” Western New York. He has also won numerous awards including SUNY Chancellor’s award for Innovation in 2004 and UB Visionary of the year award in 2010. He developed the world’s first stand-alone virtual reality Robotic Surgical Simulator RoSS and also co-founded two start-up companies. His own research interests are in the areas of medical robotics and simulation, virtual reality in design, haptics and human-computer interaction. Kesavadas is a Fellow of American Society of Mechanical Engineering and a member of IEEE.