Home
Welcome to the homepage of Dynamic Robotics Laboratory. Our goal is to advance the current state of the art in control and mechanical design to achieve highly efficient, extremely agile, and ultra-robust dynamic behaviors in dynamic robot systems. We envision that the next generation of the dynamic robots are able to navigate in unstructured, remote, unsafe environments for disaster response and search & rescue operations to save people’s lives.
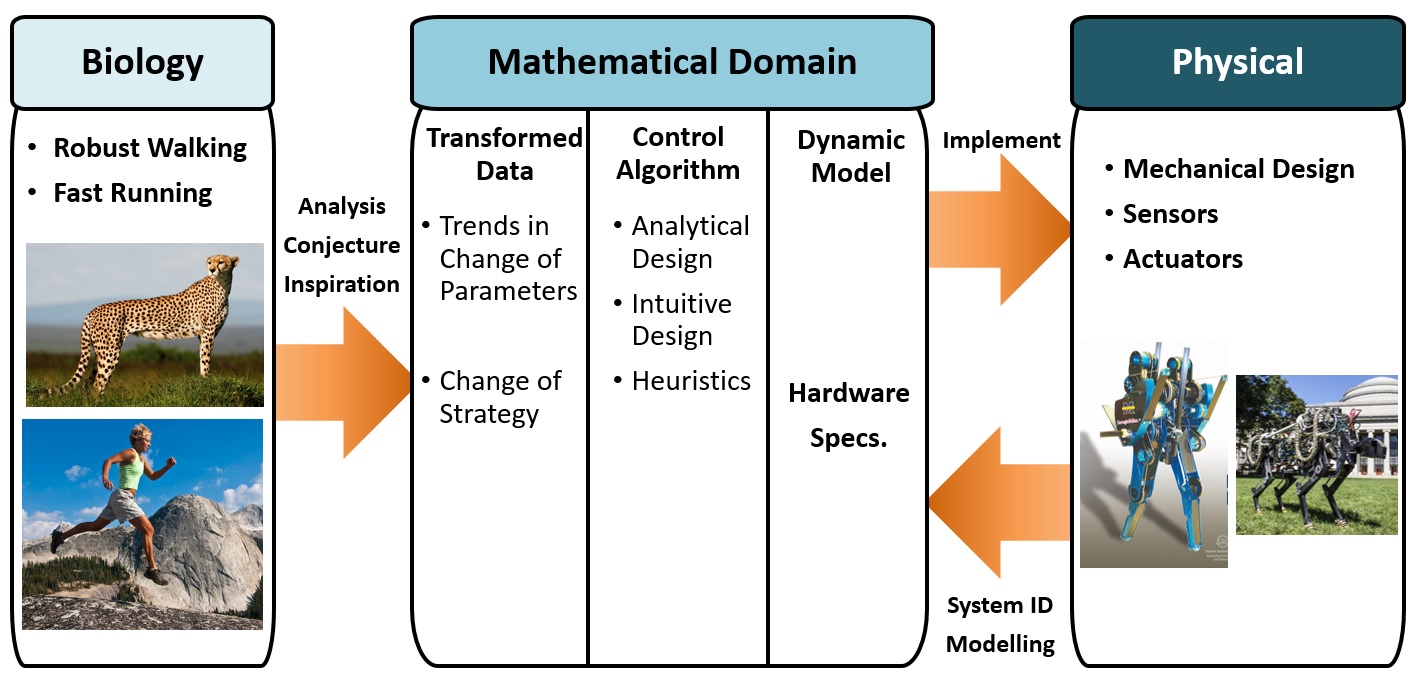
Our approach offers a unique and strong combination of modeling, simulation, and control techniques of dynamic robot systems. We utilize insights from the observation of biological systems, model-based control design technique, and experimental implementation on real hardware platforms to enable highly-dynamic and efficient performance rivaling or even exceeding biological counterparts’.
Sponsors